Carbon 60 - a flying Bucky ball.

My
first RC heli design.
Last
November (2004).
I thought it would be neat to take
some aerial photos of a home site I am interested in. Kites,
balloons or paying for professional aerial photos were all
options but I thought it would be fun to try to do it from a
model air-craft of some kind. I had never flown models before and
the saga of learning to fly a model is elsewhere on this site
along with some videos. I fly full sized gliders and it wasn't
too hard to fly fixed wings after the initial prangs. I
completely ruled out regular helicopters as being too expensive
and too hard to fly. I was impressed with the quad rotor
dragonfly but it was too small and the professional version too
expensive.
April
2005.
I bought a dragonfly micro heli. It took a month
to arrive and had serious drift problems in the gryo so it took
quite a while to install “separates”, get them
working and then learn to hover.
July
2005.
Bought a Blade runner. This is an amazing kids
toy. Co-axial rotors with no cyclic. If floats like a balloon. At
50 grams and limited to totally still air make it is useless for
camera work but steered me away from quad rotor towards co-axial.
August
2004,
I started my co-axial project.
I wanted to use
off the shelf parts as much as possible. I was fairly familiar
with dragonfly parts and they are relatively cheap. Other types
are probably better for this but this was an experiment.
Early
on I was thinking of using two dragonfly (sans tails) mounted
right way up. I was also thinking of modifying the rotors so the
shaft extended through the rotor head so it could also be held at
the top as well.
One problem with this arrangement is a lot
of wiring has to be run between the two helis. I was thinking of
controlling both cyclics at that point so there would have been a
lot of wire to route and some of them passing high currents.
All
the co-axial designs I've seen have both rotors on one shaft,
this means major modifications and probably requires a fairly
decent workshop plus a lot of hours.
Turning
the problem upside down.
By turning the bottom heli
over all the interconnection problems go away. The down side - so
to speak - is the C.G. is very high. The heli would not be
inherently self-righting. I thought (wrongly) that is would be
stable though. By stable I mean it stays in the attitude you put
it in.
The frame.
The frame is a bucky ball made
from 2mm carbon fibre rods - 90 rods 13cm long - 60 vertexes.
The idea is in part to provide a undercarriage but mainly it
is to partly protect the rotors from bumps when flying through
clutter (trees).
There are a lot of possible shapes that
might be better, this was a starting point that I thought would
be fun.
The ball is about 650mm across so it will fit through
a standard doorway.
The rotors.
Making the reverse pitch
blades for the bottom was problematic. You can't buy them as far
as I know so I bought symmetrical profile blades (like-90) and
tried to modify then to add pitch.
The first set I removed
material at the root to add 10 deg pitch but they were destroyed
on the first test run due to a stupidity error.
The next set I
used PCB material to make wedges. I later damaged one blade in a
heat gun accident.
I had serious vibration problems which I
blamed on the damage but later found other factors.
The
blades were a little long anyway, then I used some "CP
twister" blades fitted using 15 deg balsa wedges.
These
wedges didn't last long and I replace them with spruce.
The
top rotor is powered by a brushless motor - bottom is brushed for
now. It remains to be seen if a brushless motor will respond fast
enough for yaw control.
With a 3 cell poly battery fitted the
top rotor has enough power to lift off without the lower assembly
is place.
Ideally the blades should be the same top and
bottom.
Yaw control.
Yaw control is through
differential speed control of the two rotors. I don't have a
co-axial mixer so I've fudged it for the tests by using a heading
hold gryo to control the lower rotor speed. This is not ideal but
works well enough for basic hover testing. Ultimately I'll
probably have to build a custom mixer.
Cyclic
Only the top rotor has cyclic
control. Servos are fitted to both rotors but the bottom ones are
electrically disconnected.
Initially I had fly bar
stabilization on the lower rotor but this doesn't work well,
particularly if there is a wind shadow from the innards.
Sept - First test.
First tests were
hopeless due to extreme vibration. I expected the frame to
vibrate but not this much. The thing was literally shaking apart
and I had some rotor strikes – not clear which happened
first, the strike or the frame failure. I've only broken one rod
so far due to rotor impact all the other failures were glued
joins. The first tests were with just the top assembly fitted. I
tamed the shake a little by adding a cross brace and balancing
the rotor better.
With a three cells lipo fitted the top
rotor has enough grunt to lift off (I was holding it to stop it
spinning).
With the bottom assembly fitted (and a few mistakes
and accidents) I got the gyro to lock properly and it held a
(fairly) stable heading.
I have more vibration problems but
eventually got it good enough to increase power to what I think
was the point of lift off – it just fell over.
No matter
what I did with the controls it would always fall over to the
left.
After much head scratching I figured the problem was
that the lower fly-bar paddles were passing through the wind
shadow of the battery at the back. If I understand fly-bar theory
correctly this would cause the symptoms I was seeing.
Off with the bottom fly-bar paddles.
I
removed the lower paddles and found a way to re-arrange the
linkages to lock the pitch neutral. I didn't get it quite correct
because the swash plate position is moved in the process. So now
it always fell over backwards.
I re-adjusted and still had
problems. Again bad vibration which I then but down the a warped
swash plate, it is more like I have a bent shaft. I was able to
compensate for the wobble but still had it falling over.
I
added “training wheels” (as it the top photo) to give
me a better chance of keeping it upright and finally managed to
briefly lift off.
Lift off and let down.
I could lift off
but rather than float like a helium balloon as I'd hoped it flew
more like a balloon being deflated..
This was one of the many
times I was about to give up and try something else – maybe
a blade-runner on steroids.
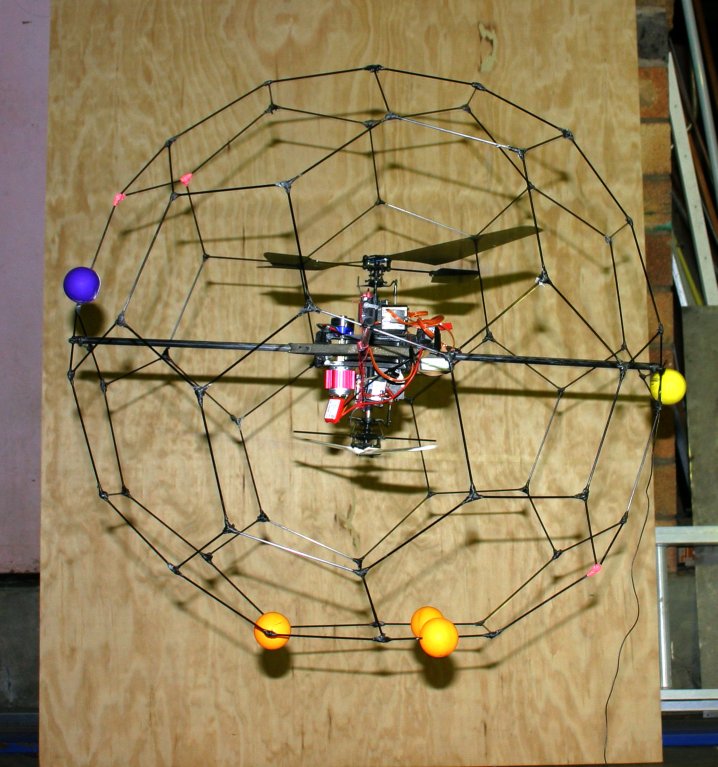
The
ball in flight.
Click the image for a larger version.
Blue is the front,
yellow is the “tail” with the antenna dangling from
it.
I see a problem.
I have a theory (or two)
about why it is so unstable. It goes some thing like this.
The
lower rotor is in the wash of the upper one. It is has to work
hard to generated lift in the down flow – like trying to
swim up a waterfall.
The upper rotor has a similar problem
with the air being suck away from under it but I think this is a
lesser effect.
If you now bank or pitch (or get hit by a side
gust) the lower rotor hits cleaner still air on one side.
Let's
say you bank right, the lower rotor goes left relative to the
upper one and momentarily hits still air one the left –
this would cause it to bank right even harder, in other words we
have positive feed back. The wind shadow from the innards is also
hitting a different part of the rotor but this would be a
stabilizing negative feedback.
This problem is worse with a
large rotor separation like I have. One possible improvement
might be to add a duct but this would need about half a square
meter of material and significantly add to the weight.
My
dragonfly has generally been more unstable that I think it should
be and I suspect the flybar would work much better on top away
from the rotor wake. Other people seem to manage OK but there
have been reports similar to mine in some of the forums.
More gyros.
I borrow an extra gryo and
added gryo stabilization to the cyclic. Initially it made no
difference at all. I think the vibration was just too bad for the
gyros to cope. The next day I tamed the vibration and the thing
suddenly became flyable.
The wind had briefly died down and I
took it out-side. It seem to fly quite well for a while but then
the wind returned and I lost control and had it land on the roof
of the shed.
One downside of the ball shape is it rolls, it
rolled off the roof, fell to earth and I had to re-glue about 10
of the joins.
I've never got it to fly as well since.
Vibration.
Some of the vibration problem
seem to be due to damage or a defect in the lower rotor head. It
is likely to be a bent shaft but I haven't dug into it yet.
Flybar-less.
I've had a couple of brief
attempts at flying without the top fly-bar (paddles). I noticed a
shift in the effects of the controls. I would expect the controls
to keep working in their normal sense because of the way I
coupled the linkages. I expected a 90 deg phase lag from when the
rotor angle of attack was changed to when the rotor tilts but I
observed something like a 65 to 70 deg shift instead. I guess the
rotors are too light and slow to act like perfect gyroscopes. In
any case I couldn't fly it but it will be worth revisiting the
idea at some point.
The little co-axials hitting the shops
(twister bell-47 or alpine mountain rescue) don't use fly-bars
but do have some spinning masses on top.
The bottom line is that even on a good day it
probably flies a little worse than my dragonfly.
I had
to add lots of angle to the flybar paddles to be able to fly it
at all.
Part of the problem is visual, it is easy to loose
track of what is front and what is back. Even top and bottom can
be mixed up.

Next??
I don't know how far I will take this. There are
lot of things to do to improve it. Some of the things will be
re-usable on other models so the effort isn't totally wasted if I
can't sort it out.
The frame will most likely be replaced by something simpler
and stiffer. The whole lower rotor assembly could be replaced by
a simple hub. Since the lower rotor doesn't seem to be making the
thing stable there might be little point in trying the match it
to the top rotor – it is possible that a four blade lower
rotor might work better.
A mixer needs to be made and
there is scope for improved control electronics for the cyclic.
If you read this far you might be interested in seeing a little video clip, it is not particularly stable but you can see the yaw control is working. Also bear in mind this thing has only been flying for a few days so I haven't got the hang of it yet. It does go better out of ground effect as well.
This project is unlikely to be continued because I bought a flying brick.
Cheers Eddie,